
According to National Oceanic and Atmospheric Organization, the portion of the ocean still to be explored is more than 80%. We still have kilometers and kilometers of surface to know and map before we can feel truly satisfied.
Yet, the exploration of the seas is not as simple as it seems.
Ships alone are too slow and too expensive to do such a job. They need extra help, an ally to rely on to explore the immense blue.
This is where technology comes into play, with the production of aquatic robots capable of going deep down, controlling the ocean and all its secrets.
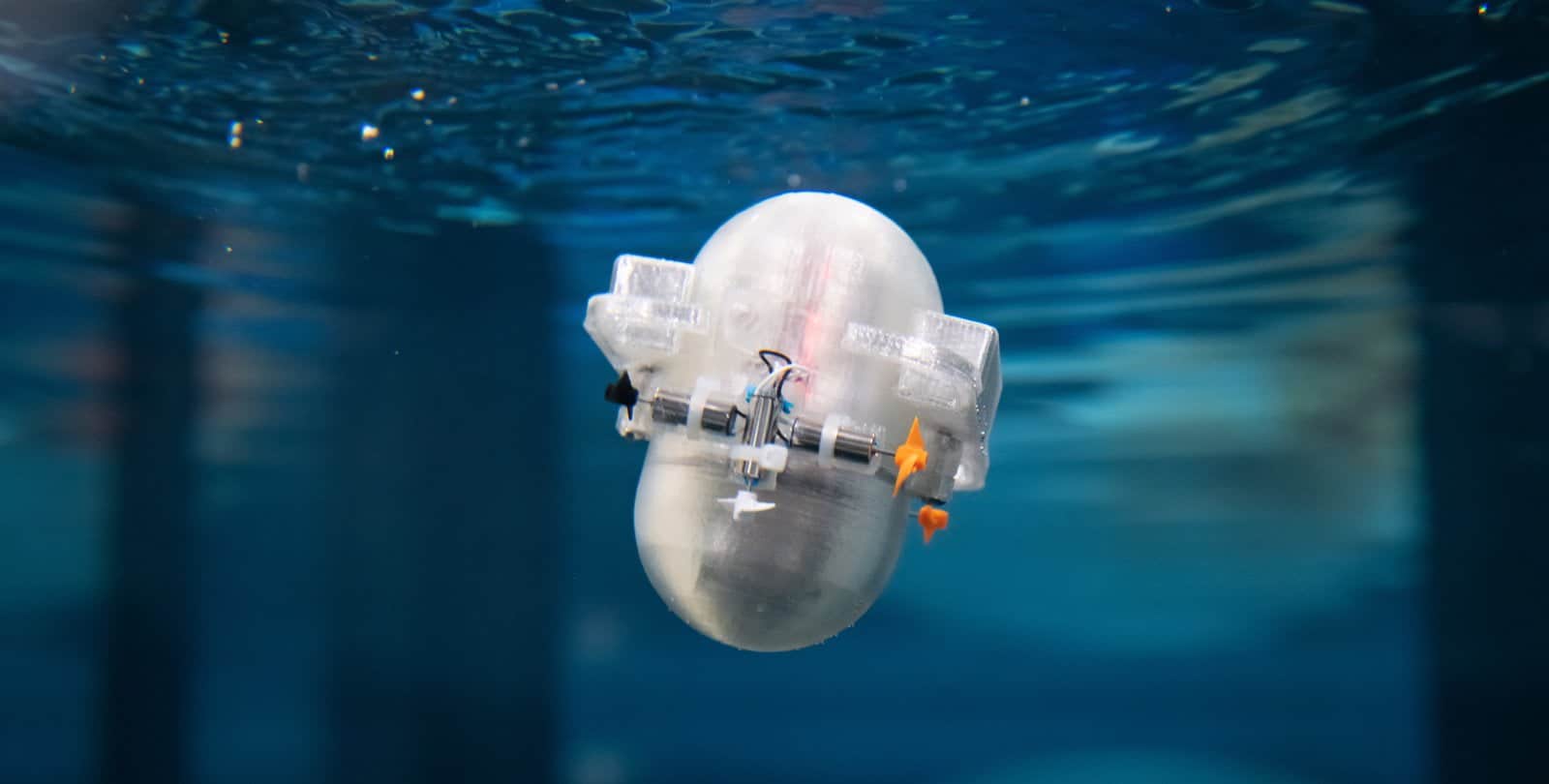
This is what he believes John O. Dabiri, a professor of aeronautics and mechanical engineering at the California Institute of Technology. His team's project led to the creation of CARL-Bot (Caltech Autonomous Reinforcement Learning Robot), an aquatic robot little more than a hand.
CARL is powered by an internal microprocessor, which allows it to move freely and record everything it observes. A tiny camera that can reach into the ocean's most unknown depths, giving scientists something to work with.
CARL's memory and its functioning
The CARL water robot owes its invention to the Caltech graduate student Peter Gunnarson, which produced it within the Dabiri laboratories.
At the moment, CARL is receiving a number of small changes. It is important that he can orient himself and navigate the ocean on his own, without the need for external control.
Gunnarson asked the computer scientist for help Petros Koumoutsakos, which managed to develop artificial intelligence algorithms for CARL, potentially capable of teaching it to orient itself based on changes in the environment and past experiences.
Nature Communications. published their research only this week, demonstrating the extraordinary nature of the project.
The algorithms developed by Koumoutsakos exploit the robot's memory, its "memories". The objective, as Dabiri confirms, is to "use this information to decide how to deal with the same situations in the future"
The lab is still in full swing, and scientists are trying to figure out if CARL will really get the job done.
Below, the presentation left by Caltech about the project.
To carry out the different tests, the team will place CARL inside a tank, with small jets capable of generating horizontal currents to navigate through.
During the tests, we will also take care of regulating and lightening the load of the sensors by CARL.
When a robot is equipped with tools such as LiDAR or cameras, its ability to stay in the ocean for a long time before needing to change the battery becomes quite limited. By lightening the load on the sensors, researchers would be able to increase the use time of CARL and obtain much better results.
The “bionic jellyfish” project that explores the ocean
CARL's software, given its incredible complexity, could act as a "forerunner" for other innovative projects.
Last year, Dabiri's group - still the same group - published research regarding the use of electrical zapping to control the movements of a jellyfish .
Adding a chip similar to CARL's would allow researchers to better guide jellyfish through the ocean.
Unlike robots, jellyfish would have no depth limits, they could reach virtually any place.
CARL is just the beginning of a much larger project, which will allow us to closely observe every corner of the sea surface. Dabiri's vision is great and enthusiastic, we just have to wait for the next updates.
Could you one day in the future imagine 10.000 or a million CARLs (we'll give them different names, I guess) all going into the ocean to measure regions we simply can't access today at the same time so as to get a time-resolved image of how the he ocean is changing. (…) It will be really essential for modeling climate predictions, but also for understanding how the ocean works.

