
Shape memory polymers are promising materials in many emerging applications due to their great stretchability and excellent shape recovery. When stretched or deformed, shape memory polymers can return to their normal state by simply applying heat or light.
These materials hold great promise for soft robotics, smart biomedical devices, and deployable space structures, but until now they have failed to store enough energy while being stretched. This means they don't release a lot of energy when stretching, which limited their use in activities involving lifting or moving objects.
Now, the researcher zhenanbao of Stanford University in California and his team have developed a shape memory polymer for new robotic muscles. Thanks to this solution, robots can move their arms by themselves when the polymers are heated. The new polymers can lift objects 5000 times their weight and store nearly six times more energy than previous versions.

More powerful, lighter, cheaper robotic muscles
Activated by heat or light, the new artificial muscle has a polymer skeleton of polypropylene glycol. To this, the researchers added units of 4-,4′-methylene bisphenylurea. In the original state of these polymers, the chains of the material are tangled and disordered. Their stretching causes the alignment of the polymer chains and the formation of hydrogen bonds between the urea groups, creating supermolecular structures that make it stable and solid. If you then heat the polymers to 70°C, the hydrogen bonds break again. And what happens? The “robotic muscle” can return to its initial state, releasing energy from bonds in the process.
In tests, the polymer was stretched up to five times its initial length and stored up to 17,9 joules of energy per gram in its extended form, six times that of most other shape memory polymers.
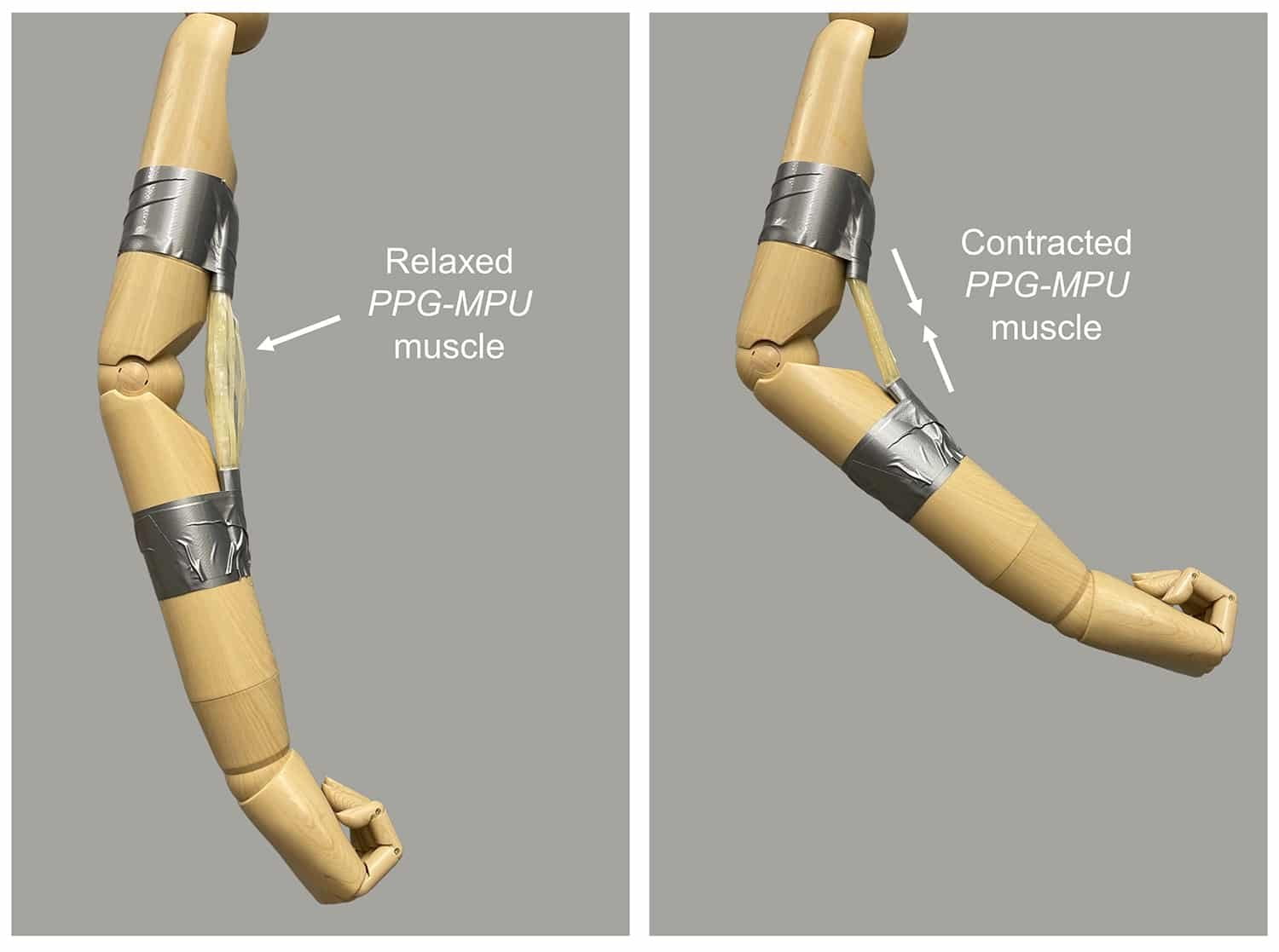
To demonstrate the potential uses of these polymers, the team made an artificial muscle by attaching pre-stretched polymer to the upper and lower arms of a wooden dummy. When heated, the material contracts, forcing the mannequin to bend his arm at the elbow.

