
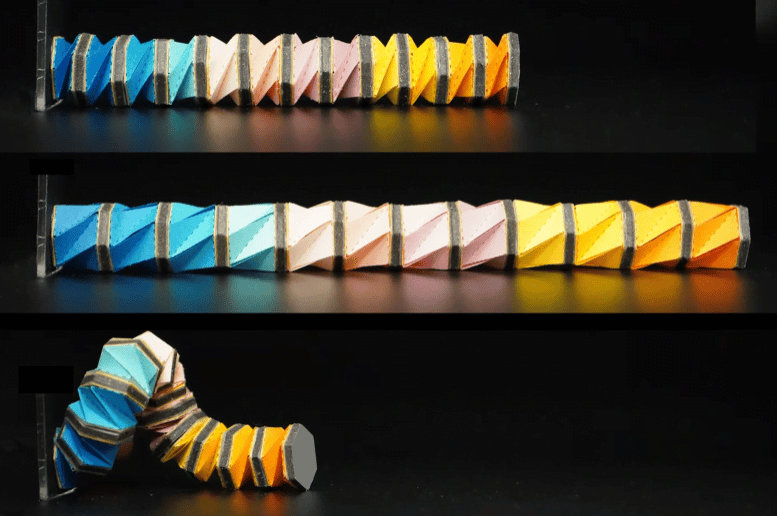
In its elongated form, this robotic arm looks like an accordion that can expand and fold back on itself effectively for a thousand applications.
This design, described in detail in a new study published in the journal PNAS, is inspired by the octopus tentacle and mimics the way it stretches, twists and manipulates objects. Its creators hope it can be integrated into biomedical applications to assist in invasive procedures or operations, such as inserting a breathing tube through the mouth, or applying a catheter.
“The octopus's nervous system is located in its tentacles,” he says Ruike Renee Zhao, assistant professor of mechanical engineering at Stanford University and author of the new paper.
What we're doing here is mimicking his highly intelligent arm system. Because the tentacles of an octopus are so versatile they could have hundreds, thousands of different movements to interact with objects.
Ruike Renee Zhao, Stanford University
How the new octopus-inspired robotic arm is made
The new robotic arm owes its flexibility to some key features, including movements powered by a magnetic field rather than motors, origami-inspired panels, and a soft exoskeleton.
The "origami" octopus
A series of tiny segments makes up a single arm of this soft robots. Inside each segment, two hexagonal soft silicone plates embedded with magnetic particles in tilted plastic panels designed with an origami pattern kresling, an origami style that twists to stretch and contract. The shape of the panels allows the arm to extend into a tube or shrink into its compressed configuration, just like the octopus tentacles.
Because of the magnetized plates throughout the arm, the robotic octopus can be operated remotely using a strong magnetic field, somewhat like those created inside an MRI scanner. During the testing phases, the researchers used electromagnetic coils to create a three-dimensional magnetic field around the arm. By adjusting the direction of the magnetic field around the arm, they are able to guide the movement and deformation of individual origami units. The design also allowed the researchers to control each segment of the arm independently to fine-tune the movements.
By controlling the external magnetic field, we can control having elongation, bending and other combinations. We could check the exact point from which the octopus robot starts to bend.
Ruike Renee Zhao, Stanford University
Extraordinary versatility
It is possible to customize everything in the arm, from the magnetizing force, to the dimensions, to the materials it is made of, to how many units it is made of.
The ability to get a robot that can move without the need to incorporate motors is an absolutely incredible factor. It allows you to really minimize the size of the entire "octopus" robot system, and dramatically increase the possible applications.

